

下次您将硬币放在地上时,请考虑如何再次捡起它。也许您的听力告诉您它弹跳的方式。您的视力使您可以在其位置零。对于最终的至关重要的行为是将其从地面到您的手,您依靠触摸感来确切知道何时将手指夹在一起,以及如何将其翻转到手掌或口袋中。
但是许多人这样做的事情很容易,很少有机器人可以解决。尽管他们取得了所有成就,他们击败了国际象棋大师,在城市街道上开车,从地毯上拉出了整个狗的毛发 - 大多数机器人都在不耐心,而不仅仅是在情感上。
典型的机器人是麻木而愚蠢的,亚马逊应用科学总监Aaron Parness说,尤其是那些在商业环境中工作的科学。``过去,当工业机器人意外接触时,他们要么紧急停止,要么通过该接触粉碎。他们经常甚至不知道自己遇到了什么,因为他们无法感觉到。
 瓦肯(Vulcan)选择和存放项目的能力使我们的同事的工作更加容易,我们的运营效率更高。
瓦肯(Vulcan)选择和存放项目的能力使我们的同事的工作更加容易,我们的运营效率更高。
今天,在我们在德国多特蒙德举行的未来活动中,我们介绍了一个既不麻木也不愚蠢的机器人。基于机器人技术,工程和物理AI的关键进展,Vulcan是我们的第一个具有触摸感的机器人。
Parness说:“ Vulcan代表了机器人技术中的基本飞跃。”“这不仅是看到世界,而且感觉到它,从而实现了直到现在的亚马逊机器人不可能的功能。”

而且,这已经改变了我们运营履行中心的方式,使员工的工作更加安全,同时更加有效地订购了员工的工作。
与Vulcan一起工作,我们可以更轻松地选择和存放。很高兴看到我的同事中有多少工人获得了新的工作技能,并像我一样扮演了更多的技术角色,一旦他们开始在我们的网站上与技术紧密工作。”
Vulcan并不是我们第一个可以捡起东西的机器人。我们的麻雀,红衣主教和罗宾系统使用计算机视觉和吸力杯移动人工工人包装的单个产品或包裹。Proteus,Titan和Hercules举起和拖拉我们的履行中心周围的商品车。
但是,它具有触摸感,其能力了解何时以及如何与物体接触,从而解锁了改善我们的运营工作和设施的新方法。
在我们的履行中心中,我们通过将库存存储在织物覆盖的豆荚中,这些库存被库存库存,这些库存分为大约一个脚正方形的隔室,每一个平均最高可容纳10个物品。对于缺乏人类自然敏捷的机器人来说,将一件物品纳入这个拥挤的空间中或从这个拥挤的空间中摘除。
Vulcan是我们第一个具有类似技巧的机器人。Vulcan可以轻松地操纵这些隔间内的物体,以腾出空间,因为它知道它何时进行接触以及它的施加力量,并且可能停止造成任何损坏。
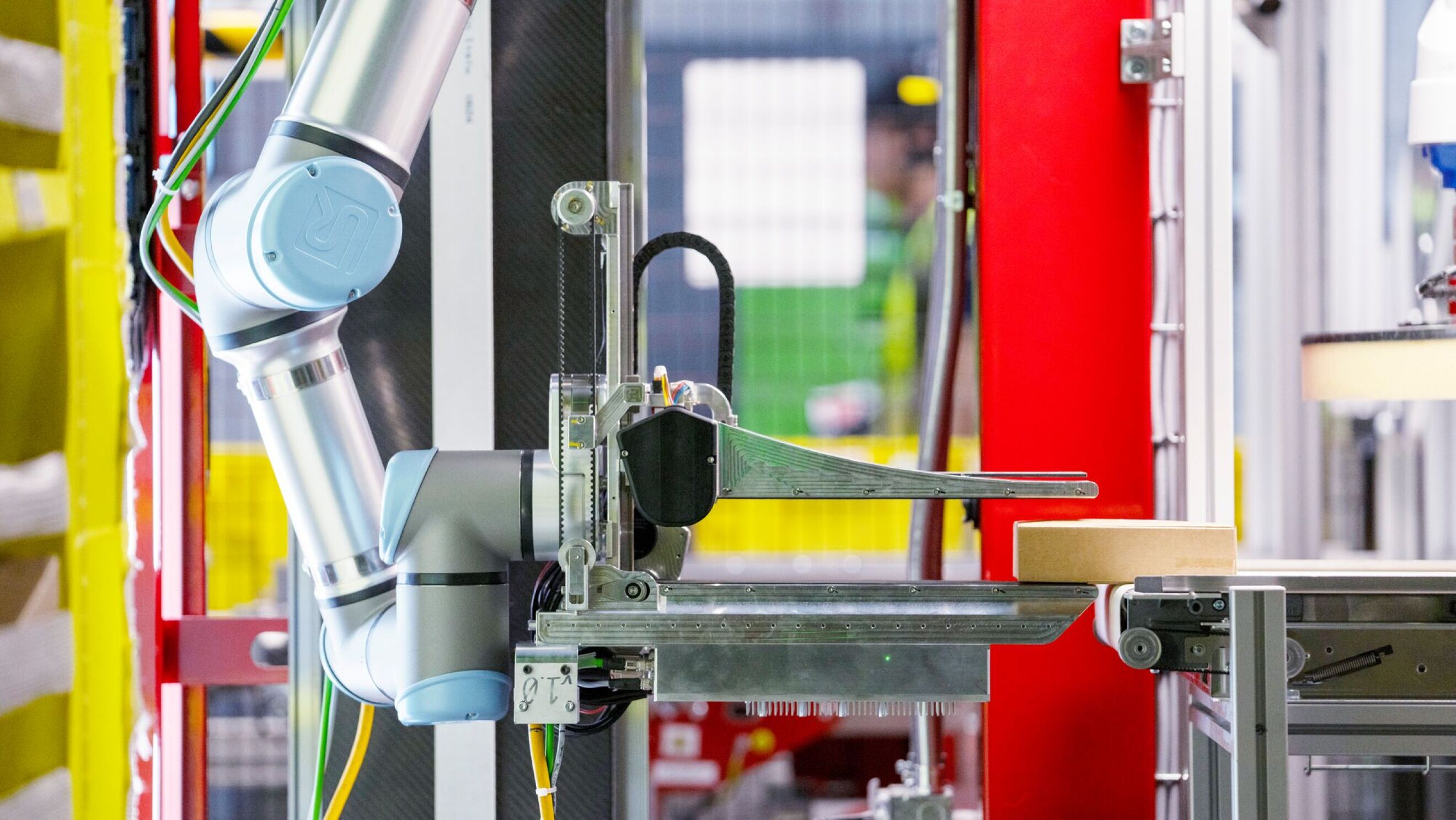
Vulcan使用类似于固定器上的统治者的手臂工具的末端来做到这一点,再加上强制反馈传感器,这些传感器说明了它的努力或固定物品的固定程度,因此它可以保持在造成伤害的风险之下。
标尺位将已经在这些隔间中的物品推动,以腾出任何想要添加的东西。发型(桨)的臂(桨)固定要添加的物品,根据项目的尺寸和形状调整其握力强度,然后使用内置的输送带来zhoop物品进入垃圾箱。
为了从这些垃圾箱中摘取物品,Vulcan使用携带相机和吸盘的手臂。相机查看隔间,并挑选出要抓取的物品,以及最佳的位置。当吸力杯抓住它时,相机手表以确保它做正确的事,只有正确的东西,避免了我们的工程师称之为共同提取非目标物品的风险。”
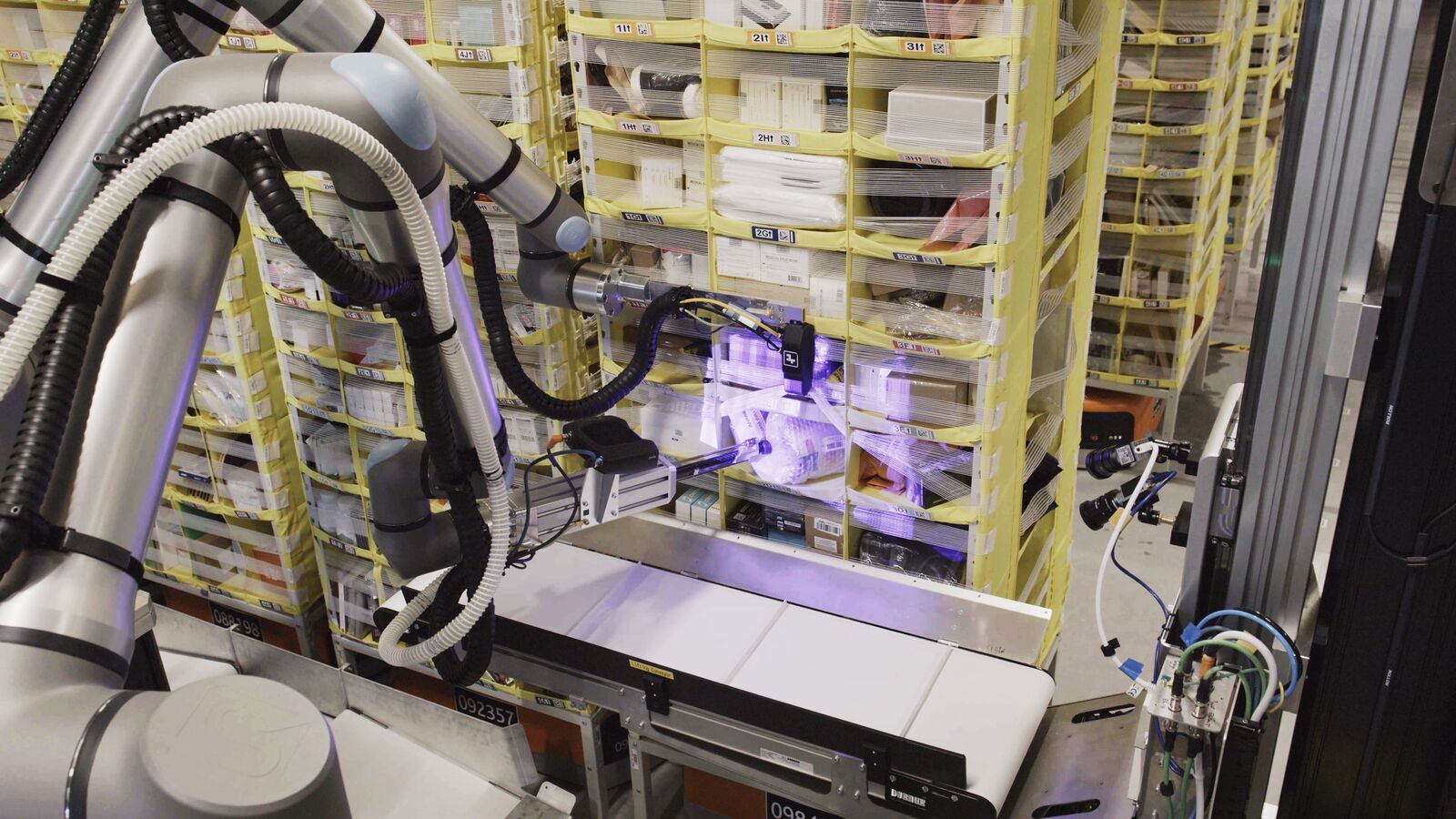 Vulcan使用携带相机和吸盘的手臂从我们的存储豆荚中挑选物品。
Vulcan使用携带相机和吸盘的手臂从我们的存储豆荚中挑选物品。
凭借与我们在履行中心存储的所有类型的物品中约有75%的能力,并且以与前线员工相当的速度,Vulcan代表了自动化和AI如何帮助员工日常任务的步骤。它还具有智能,可以识别何时可以移动特定物品,并可以要求人类合作伙伴加入,从而帮助我们通过合作来利用技术和员工可以实现的最佳成就。
人类机器人的联系
我们做了所有这些工作,不仅提高效率,而且提高工人的安全和人体工程学。在我们位于斯波坎,华盛顿州和德国汉堡的履行中心,瓦肯集中专注于在这些库存豆荚的顶部排行和存放库存。由于这些行约为8英尺,他们通常要求员工使用阶梯梯子到达他们,这是一个耗时,累人的过程,而且较符合人体工程学的过程比在他们的中间段落和捡拾夫人的过程不那么符合人体工程学。Vulcan还处理固定在地板上方的物品,因此我们的员工可以在最舒适的地方工作。
瓦肯人与我们的员工一起工作,这种组合比自己要好。” Parness说。
 Vulcan将使我们的同事在步骤梯子上花费更少的时间,而在其权力区域工作的时间更多。
Vulcan将使我们的同事在步骤梯子上花费更少的时间,而在其权力区域工作的时间更多。
这种瓦肯人功能的应用只是我们如何看待和使用这种技术的最新示例。在过去的十几年中,我们在履行中心中部署了75万多个机器人,所有这些机器人旨在通过对履行过程中的物体征税来帮助我们的员工安全有效地工作。
同时,这些机器人在完成75%的客户订单中发挥作用,在亚马逊创造了数百个新类别的工作,从机器人地板监视器到现场可靠性维护工程师。我们也提供诸如职业选择之类的培训计划, 哪个帮助我们的员工进入机器人技术和其他高科技领域。

Vulcan的技术并不是偶然的。正如它适合我们的机器人技术方法一样,这是我们如何创新的一个例子:我们选择重要的问题并找到或开发解决方案 - 我们不创建有趣的技术,然后寻找使用它的方法。
瓦肯(Vulcan)从我们的意识到,每当我们的一位员工都必须使用梯子到达存储豆荚的上部时,他们就会花时间在较不符合人体工程学和效率较低的任务上。在此过程中添加一个机器人需要多年的各种技术工作,从力量反馈传感器和可以仔细处理数百万个独特物品的手,到一个工具,用于剥夺各种形状和尺寸的各种盒子和袋装,到立体视觉系统的各种盒子和袋装,以估算箱子中可用空间的位置。
 瓦肯(Vulcan)代表了三年前似乎不可能的技术,但现在将有助于改变我们的运营。”
瓦肯(Vulcan)代表了三年前似乎不可能的技术,但现在将有助于改变我们的运营。”
它还需要新颖的物理AI应用,包括用于识别哪些物品可以或可以处理的算法,在垃圾箱内找到空间,识别牙膏管和纸夹的盒子等等。而且我们不仅可以通过计算机模拟教瓦肯人,但对其AI进行了培训,以结合触摸和强制反馈的物理数据。从捡起袜子到移动脆弱的电子产品,它解决了数千个现实世界的例子。
Vulcan甚至从自己的失败中学习,弄清楚不同物体在触摸时的行为如何,并稳步地建立对物理世界的理解,就像孩子一样。因此,您可以期望它在未来几年中变得更聪明,更有能力。
Parness说,结果是三年前似乎不可能的技术,但现在将有助于改变我们的运营。”
这种转变不仅是因为Vulcan的能力如此,还因为我们在亚马逊规模上实施了最好的工作。我们计划在接下来的几年中,在欧洲和美国各地部署瓦生系统。
Parness说,我们的愿景是通过减少身体要求的任务来扩大我们的网络,提高运营效率,提高运营效率,提高工作场所的安全性并为员工提供支持。”
更好的运营效率可以以更快的速度将正确的产品送入正确的卡车,从而使我们能够继续扩大我们的选择和提供行业领先的价格。
所需要的只是教机器人感觉。