
从折叠盒到固定真空吸尘器,GEN-1 机器人模型达到 99% 的可靠性
机器人机器学习公司 Generalist 拥有宣布GEN-1,一种新的物理人工智能系统,据称它在“广泛的物理技能”上“达到了生产水平的成功率”,而这些技能过去需要人类双手的灵活性和肌肉记忆。通才还大力宣传新模式能够通过即兴采取新举措来应对干扰,并“连接不同地方的想法以解决新问题。”
GEN-1 建立在 Generalist 之前的 GEN-0 模型之上,该公司11月备受推崇作为机器人训练中缩放定律适用性的概念证明,展示更多的预训练数据和计算时间如何提高训练后的性能。但是,虽然大型语言模型已经能够有效处理数万亿个单词作为训练的一部分,机器人模型集体编写在互联网上,但它们没有类似的、易于访问的关于人类如何操纵物体的高质量数据源。
为了帮助解决这个问题,Generalist 依靠— 数据手 —,一套可穿戴的钳子,可以捕捉人类执行手动任务时的微动作和视觉信息。Generalist 现在声称它已经收集了超过 50 万小时和“PB 级的物理交互数据”来帮助训练其物理模型。
闭嘴,把我的钱(从钱包里拿出来)(然后放回去)。
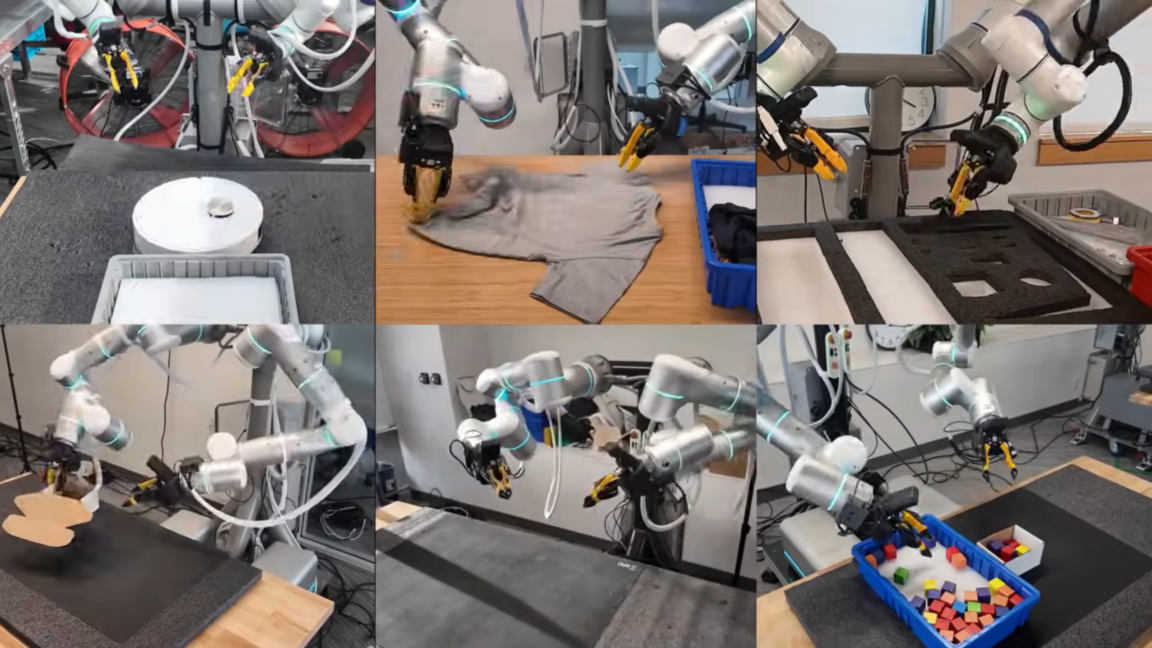
结果是一个足够精确的自治系统把钱放进钱包并且有足够的适应性折叠衣物或分类汽车零部件。该模型现在在重复性但精细的机械任务(例如折叠盒子、包装手机和维修机器人真空吸尘器据 Generalist 称,速度大约是之前 GEN-0 型号的三倍。据该公司称,GEN-1 只需花费大约一个小时对其预训练进行调整以适应适用于其特定机器人实施例的“机器人数据”,就可以达到这些标准。
从错误中恢复
过去,复杂的机器人系统通常依赖于精心预编程的动作,或者经过训练专门专注于几乎没有变化的单一任务。Generalist 表示,GEN-1 的与众不同之处在于单个模型能够根据之前的经验即兴发挥,并自然地响应干扰,即使这些干扰“远远超出了训练分布范围”。